
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

स्टेपर मोटर्स और सर्वो और सर्वो मोटर्स के बीच अंतर को समझने के लिए एक लेख
I. स्टेपर मोटर्स और सर्वो और सर्वो मोटर्स के बीच अंतर
स्टेपर मोटर: ओपन-लूप नियंत्रण तत्व स्टेपर मोटर भागों के कोणीय विस्थापन या लाइन विस्थापन में विद्युत पल्स सिग्नल है। सीधे शब्दों में कहें तो यह कोण और घुमावों की संख्या को नियंत्रित करने के लिए विद्युत पल्स सिग्नल पर निर्भर करता है। इसलिए वह यह निर्धारित करने के लिए कि कितना घूर्णन है, केवल पल्स सिग्नल पर भरोसा करता है। चूँकि कोई सेंसर नहीं है, इसलिए रुकने का कोण विचलित हो सकता है। हालाँकि, सटीक पल्स सिग्नल विचलन को कम करता है।
सर्वो मोटर: रोटेशन की स्थिति को नियंत्रित करने के लिए सेंसर के माध्यम से, मोटर की गति को नियंत्रित करने के लिए सर्वो नियंत्रण सर्किट पर भरोसा करें। इसलिए स्थिति नियंत्रण बहुत सटीक है। और घूर्णन गति भी परिवर्तनशील है।
सर्वो (इलेक्ट्रॉनिक सर्वो): सर्वो का मुख्य घटक सर्वो मोटर है। इसमें सर्वो मोटर नियंत्रण सर्किट + रिडक्शन गियर सेट शामिल है। अरे हाँ, सर्वो मोटर में रिडक्शन गियर सेट नहीं है। और सर्वो में एक रिडक्शन गियर सेट है।
एक सीमा सर्वो के मामले में, यह पतवार बांह के स्टीयरिंग कोण को निर्धारित करने के लिए आउटपुट शाफ्ट के नीचे एक पोटेंशियोमीटर पर निर्भर करता है। सर्वो सिग्नल नियंत्रण एक पल्स चौड़ाई मॉड्यूलेटेड (पीडब्लूएम) सिग्नल है, जहां एक माइक्रोकंट्रोलर आसानी से इस सिग्नल को उत्पन्न कर सकता है।
द्वितीय. स्टेपर मोटर का मूल सिद्धांत
यह काम किस प्रकार करता है:
आम तौर पर मोटर का रोटर एक स्थायी चुंबक होता है, और जब स्टेटर वाइंडिंग के माध्यम से करंट प्रवाहित होता है, तो स्टेटर वाइंडिंग एक वेक्टर चुंबकीय क्षेत्र उत्पन्न करता है। यह चुंबकीय क्षेत्र रोटर को एक कोण से घूमने के लिए प्रेरित करेगा, जिससे रोटर के चुंबकीय क्षेत्र की जोड़ी की दिशा स्टेटर के चुंबकीय क्षेत्र की दिशा के समान होगी। जब स्टेटर का वेक्टर चुंबकीय क्षेत्र एक कोण से घूमता है। रोटर भी इस चुंबकीय क्षेत्र के साथ एक कोण बनाकर घूमता है। प्रत्येक इनपुट विद्युत पल्स के लिए, मोटर एक कोणीय कदम आगे की ओर घूमती है। इसका आउटपुट कोणीय विस्थापन इनपुट दालों की संख्या के समानुपाती होता है, और इसकी घूर्णी गति दालों की आवृत्ति के समानुपाती होती है। वाइंडिंग के सक्रिय होने के क्रम को बदलकर, मोटर रिवर्स हो जाती है। इसलिए, स्टेपर मोटर के रोटेशन को नियंत्रित करने के लिए दालों की संख्या और आवृत्ति और मोटर के प्रत्येक चरण की वाइंडिंग को सक्रिय करने के क्रम को नियंत्रित किया जा सकता है।
ऊष्मा उत्पादन का सिद्धांत:
आमतौर पर सभी प्रकार की मोटरें देखी जाती हैं, आंतरिक लोहे की कोर और वाइंडिंग कॉइल होती हैं। घुमावदार प्रतिरोध, शक्ति हानि, हानि आकार और प्रतिरोध का उत्पादन करेगी और वर्तमान वर्ग के आनुपातिक है, जिसे अक्सर तांबे के नुकसान के रूप में जाना जाता है, यदि वर्तमान मानक डीसी या साइन लहर नहीं है, तो हार्मोनिक नुकसान भी उत्पन्न होगा; कोर में हिस्टैरिसीस एड़ी वर्तमान प्रभाव होता है, वैकल्पिक चुंबकीय क्षेत्र में भी हानि उत्पन्न होगी, सामग्री का आकार, वर्तमान, आवृत्ति, वोल्टेज संबंधित, जिसे लौह हानि कहा जाता है। तांबे की हानि और लोहे की हानि गर्मी उत्पादन के रूप में प्रकट होगी, जिससे मोटर की दक्षता प्रभावित होगी। स्टेपिंग मोटर आम तौर पर स्थिति सटीकता और टॉर्क आउटपुट का पीछा करती है, दक्षता अपेक्षाकृत कम होती है, करंट आम तौर पर बड़ा होता है, और हार्मोनिक घटक उच्च होते हैं, करंट की आवृत्ति गति और परिवर्तन के साथ बदलती रहती है, इसलिए स्टेपिंग मोटर्स में आमतौर पर गर्मी की स्थिति होती है, और स्थिति सामान्य एसी मोटर की तुलना में अधिक गंभीर होती है।
तृतीय. पतवार निर्माण
सर्वो मुख्य रूप से एक आवास, एक सर्किट बोर्ड, एक ड्राइव मोटर, एक गियर रिड्यूसर और एक स्थिति का पता लगाने वाले तत्व से बना होता है। इसका कार्य सिद्धांत यह है कि रिसीवर सर्वो को एक सिग्नल भेजता है, और सर्किट बोर्ड पर आईसी कोरलेस मोटर को घुमाने के लिए चलाता है, और पावर रिडक्शन गियर के माध्यम से स्विंग आर्म तक प्रेषित होती है, और साथ ही, स्थिति डिटेक्टर यह निर्धारित करने के लिए एक सिग्नल वापस भेजता है कि यह स्थिति पर आ गया है या नहीं। स्थिति डिटेक्टर वास्तव में एक परिवर्तनीय अवरोधक है। जब सर्वो घूमता है, तो अवरोधक मान तदनुसार बदल जाएगा, और घूर्णन के कोण को प्रतिरोधक मान का पता लगाकर जाना जा सकता है। सामान्य सर्वो मोटर एक पतली तांबे की तार होती है जो तीन-ध्रुव वाले रोटर के चारों ओर लपेटी जाती है, जब कुंडल के माध्यम से धारा प्रवाहित होती है तो एक चुंबकीय क्षेत्र उत्पन्न होता है, और रोटर चुंबक की परिधि प्रतिकर्षण उत्पन्न करती है, जो बदले में घूर्णन का बल उत्पन्न करती है। भौतिकी के अनुसार, किसी वस्तु की जड़ता का क्षण उसके द्रव्यमान के सीधे आनुपातिक होता है, इसलिए जिस वस्तु को घुमाया जाना है उसका द्रव्यमान जितना अधिक होगा, बल की आवश्यकता उतनी ही अधिक होगी। तेज घूर्णन गति और कम बिजली की खपत को प्राप्त करने के लिए, सर्वो पतले तांबे के तारों से बना होता है, जिन्हें बहुत पतले खोखले सिलेंडर में घुमाया जाता है, जिससे बिना किसी ध्रुव के एक बहुत हल्का खोखला रोटर बनता है, और सिलेंडर के अंदर मैग्नेट लगाए जाते हैं, जो खोखला कप मोटर है।
विभिन्न कामकाजी वातावरणों के अनुरूप, जलरोधक और धूलरोधी डिज़ाइन वाले सर्वो हैं; और विभिन्न लोड आवश्यकताओं के जवाब में, सर्वो के लिए प्लास्टिक और धातु गियर होते हैं, और सर्वो के लिए धातु गियर आम तौर पर उच्च-टोक़ और उच्च गति वाले होते हैं, इस लाभ के साथ कि अत्यधिक भार के कारण गियर चिप नहीं होंगे। रोटेशन को तेज़ और अधिक सटीक बनाने के लिए उच्च ग्रेड सर्वो को बॉल बेयरिंग से सुसज्जित किया जाएगा। एक बॉल बेयरिंग और दो बॉल बेयरिंग के बीच अंतर है, बेशक दो बॉल बेयरिंग बेहतर हैं। नए FET सर्वो मुख्य रूप से FET (फील्ड इफेक्ट ट्रांजिस्टर) का उपयोग कर रहे हैं, जिसमें कम आंतरिक प्रतिरोध का लाभ होता है और इसलिए सामान्य ट्रांजिस्टर की तुलना में कम वर्तमान हानि होती है।
चतुर्थ. संचालन का सर्वो सिद्धांत
पूर्वाग्रह वोल्टेज उत्पन्न करने के लिए पीडब्लूएम तरंग से आंतरिक सर्किट में, पोटेंशियोमीटर को स्थानांतरित करने के लिए कमी गियर के माध्यम से संपर्ककर्ता जनरेटर, ताकि जब वोल्टेज अंतर शून्य हो, तो मोटर बंद हो जाए, ताकि सर्वो के प्रभाव को प्राप्त किया जा सके।
सर्वो पीडब्लूएम के लिए सभी प्रोटोकॉल समान हैं, लेकिन प्रदर्शित होने वाले नवीनतम सर्वो भिन्न हो सकते हैं।
प्रोटोकॉल आम तौर पर है: सर्वो को विभिन्न कोणों से घुमाने के लिए नियंत्रित करने के लिए 0.5ms ~ 2.5ms में उच्च स्तरीय चौड़ाई।
वी. सर्वो मोटर्स कैसे काम करती हैं
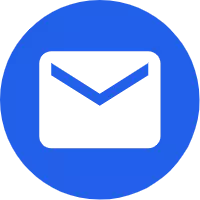
नीचे दिया गया चित्र पावर ऑपरेशनल एम्पलीफायर LM675 के साथ बनाया गया एक सर्वो मोटर नियंत्रण सर्किट दिखाता है, और मोटर एक डीसी सर्वो मोटर है। जैसा कि चित्र से देखा जा सकता है, पावर ऑपरेशनल एम्पलीफायर LM675 को 15V द्वारा आपूर्ति की जाती है, और 15V वोल्टेज को RP 1 के माध्यम से ऑपरेशनल एम्पलीफायर LM675 के इन-फेज इनपुट में जोड़ा जाता है, और LM675 के आउटपुट वोल्टेज को सर्वो मोटर के इनपुट में जोड़ा जाता है। मोटर गति का वास्तविक समय में पता लगाने के लिए मोटर गति माप सिग्नल जनरेटर से सुसज्जित है। वास्तव में, स्पीड सिग्नल जनरेटर एक प्रकार का जनरेटर है, और इसका आउटपुट वोल्टेज घूर्णी गति के समानुपाती होता है। गति मापने वाले सिग्नल जनरेटर जी से वोल्टेज आउटपुट को वोल्टेज डिवाइडर सर्किट के बाद स्पीड एरर सिग्नल के रूप में परिचालन एम्पलीफायर के इनवर्टिंग इनपुट में वापस फीड किया जाता है। स्पीड कमांड पोटेंशियोमीटर RP1 द्वारा निर्धारित वोल्टेज मान को R1.R2 द्वारा वोल्टेज विभाजन के बाद परिचालन एम्पलीफायर के इन-फेज इनपुट में जोड़ा जाता है, जो संदर्भ वोल्टेज के बराबर है।
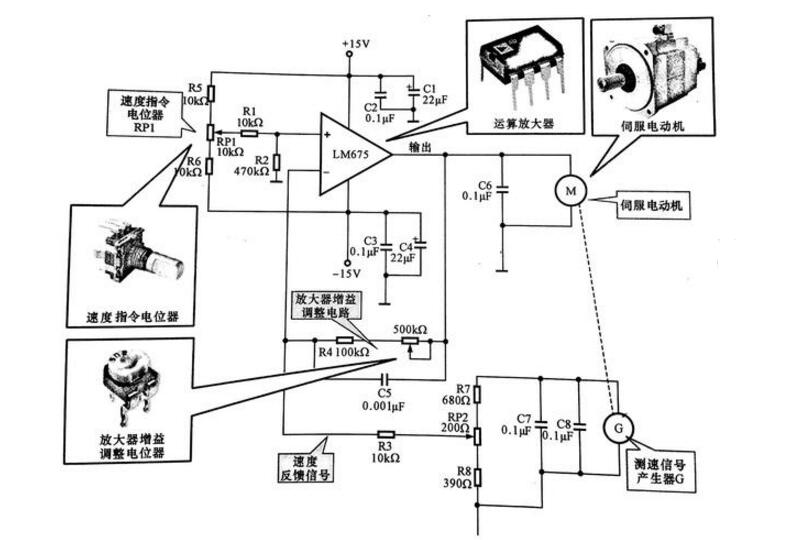
सर्वो मोटर का नियंत्रण योजनाबद्ध
सर्वोमोटर: सर्वोमोटर के लिए अक्षर एम द्वारा दर्शाया गया, यह ड्राइव सिस्टम के लिए शक्ति का स्रोत है। ऑपरेशनल एम्पलीफायर: सर्किट नाम से दर्शाया गया है, यानी, एलएम675, सर्वो नियंत्रण सर्किट में एक एम्पलीफायर टुकड़ा है जो सर्वो मोटर के लिए ड्राइव करंट प्रदान करता है।
स्पीड कमांड पोटेंशियोमीटर RP1: सर्किट में ऑपरेशनल एम्पलीफायर का रेफरेंस वोल्टेज सेट करता है, यानी स्पीड सेटिंग। एम्पलीफायर गेन एडजस्टमेंट पोटेंशियोमीटर आरपी2: एम्पलीफायर गेन और स्पीड फीडबैक सिग्नल के आकार को क्रमशः ठीक करने के लिए सर्किट में उपयोग किया जाता है।
जब मोटर का लोड बदलता है, तो ऑपरेशनल एम्पलीफायर के उल्टे इनपुट पर वापस आने वाला वोल्टेज भी बदल जाता है, यानी, जब मोटर का लोड बढ़ता है, तो गति कम हो जाती है, और स्पीड सिग्नल जनरेटर का आउटपुट वोल्टेज भी कम हो जाता है, जिससे ऑपरेशनल एम्पलीफायर के उल्टे इनपुट पर वोल्टेज कम हो जाता है, और इस वोल्टेज और संदर्भ वोल्टेज के बीच का अंतर बढ़ जाता है, और ऑपरेशनल एम्पलीफायर का आउटपुट वोल्टेज बढ़ जाता है। इसके विपरीत, जब लोड छोटा हो जाता है और मोटर की गति बढ़ जाती है, तो गति मापने वाले सिग्नल जनरेटर का आउटपुट वोल्टेज बढ़ जाता है, परिचालन एम्पलीफायर के उल्टे इनपुट में जोड़ा गया फीडबैक वोल्टेज बढ़ जाता है, इस वोल्टेज और संदर्भ वोल्टेज के बीच का अंतर कम हो जाता है, परिचालन एम्पलीफायर का आउटपुट वोल्टेज कम हो जाता है, और मोटर की गति तदनुसार कम हो जाती है, ताकि घूर्णी गति को निर्धारित मूल्य पर स्वचालित रूप से स्थिर किया जा सके।
जांच भेजें


X
हम आपको बेहतर ब्राउज़िंग अनुभव प्रदान करने, साइट ट्रैफ़िक का विश्लेषण करने और सामग्री को वैयक्तिकृत करने के लिए कुकीज़ का उपयोग करते हैं। इस साइट का उपयोग करके, आप कुकीज़ के हमारे उपयोग से सहमत हैं।
गोपनीयता नीति